
Der Begriff Chiptuning stammt aus den 1990er-Jahren. Damals wurde die Software vieler Motorsteuergeräte noch auf physischen EPROM-Chips gespeichert. Diese Chips wurden ausgelötet, neu programmiert und wieder eingesetzt.
Heute funktioniert moderne Fahrzeugsoftware völlig anders. Steuergeräte werden über OBD-, Bench- oder Bootmode-Schnittstellen ausgelesen, kalibriert und wieder beschrieben. Geblieben ist nur der Begriff. Die technische Tiefe dahinter hat sich jedoch massiv verändert.
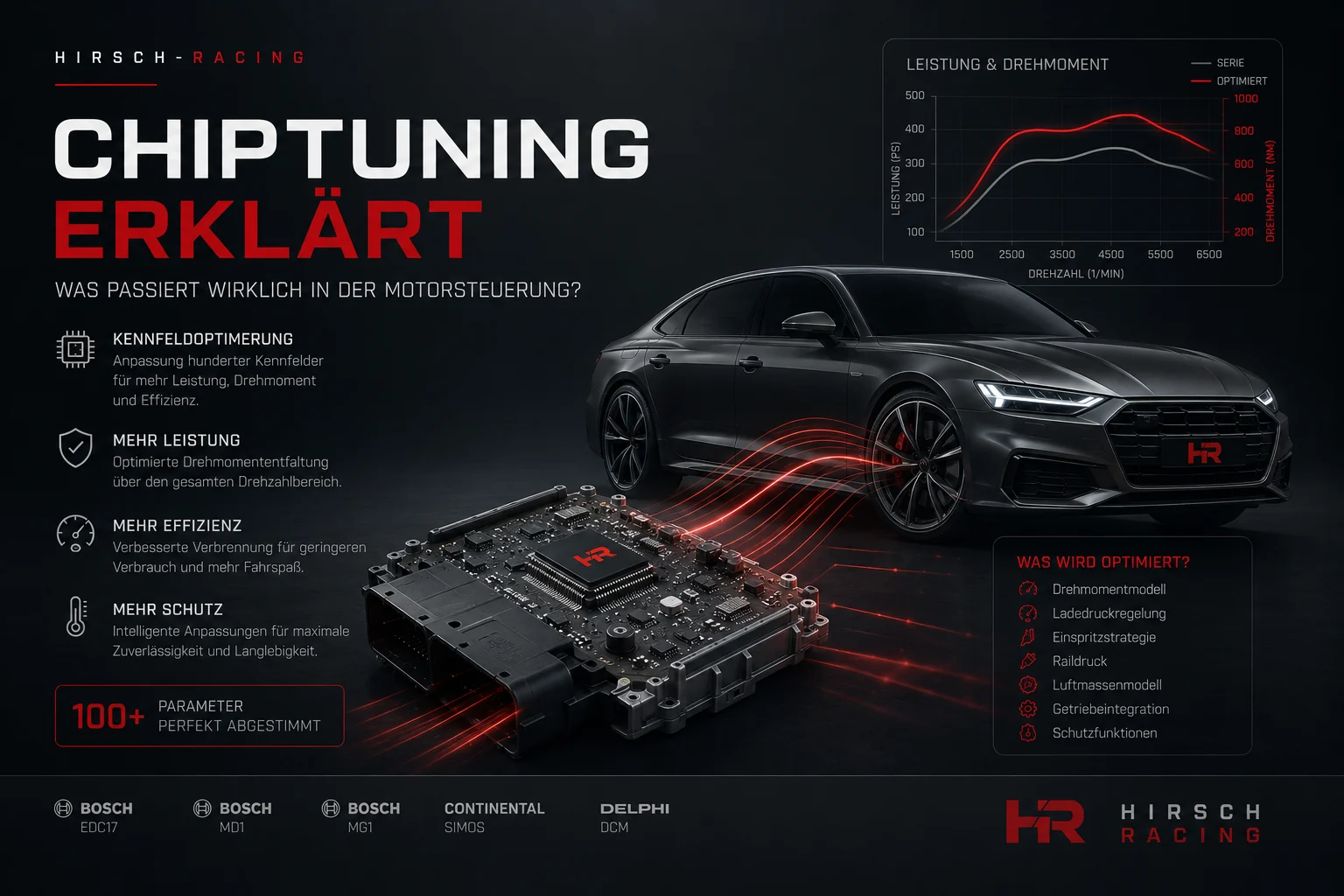
Moderne Softwareoptimierung ist heute Vehicle Software Engineering. Sie greift nicht einfach in einzelne Werte ein, sondern arbeitet mit Drehmomentmodellen, Ladedruckregelung, Einspritzstrategien, Schutzfunktionen und ECU-Plattformen.
Was ist Chiptuning?
Chiptuning bezeichnet die Veränderung von Kalibrierungsdaten in der Software eines Motorsteuergeräts. Ziel ist es, das Verhalten des Motors anzupassen – meist in Bezug auf Leistung, Drehmoment, Ansprechverhalten, Verbrauch oder Geräuschcharakteristik.
Vom EPROM zum modernen Steuergerät
Frühe Motorsteuergeräte arbeiteten mit einfachen Mikrocontrollern und austauschbaren Speicherchips. Bei älteren Bosch-Motronic-Systemen war das Auslöten und Beschreiben eines EPROMs tatsächlich übliche Praxis.
Mit späteren Generationen wie Bosch ME7, MED9, EDC17, MD1 und MG1 verlagerte sich die Software in fest verbaute Flash-Speicher. Moderne Steuergeräte nutzen leistungsfähige Mikrocontroller, geschützte Speicherbereiche, Sicherheitsmechanismen und modellbasierte Regelstrategien.
Die Kalibrierungsdaten liegen heute in eigenen Datenbereichen und können je nach Plattform über OBD, Bench oder Bootmode bearbeitet werden. Entscheidend ist dabei nicht nur der Zugriff auf das Steuergerät, sondern das Verständnis der jeweiligen ECU-Architektur.
Wie arbeitet ein modernes Motorsteuergerät?
Ein modernes Motorsteuergerät ist ein modellbasiertes Echtzeit-Regelsystem. Es verarbeitet permanent Sensordaten, berechnet daraus den aktuellen Betriebszustand des Motors und steuert die Aktoren so an, dass Drehmoment, Ladedruck, Lambda, Abgastemperatur und weitere Sollgrößen innerhalb definierter Grenzen bleiben.
Wichtige Eingangsdaten
- Luftmasse: MAF- oder MAP-Sensoren liefern die Grundlage für die Kraftstoffberechnung.
- Drehzahl und Position: Kurbelwellen- und Nockenwellensensoren bestimmen Synchronisation, Drehzahl und Motorposition.
- Temperaturen: Kühlmittel-, Öl-, Ansaugluft- und Abgastemperaturen beeinflussen Schutzfunktionen und Korrekturen.
- Lambda und NOx: Sensoren überwachen Verbrennung und Abgasnachbehandlung.
- Klopfsensoren: Bei Benzinmotoren erkennen sie unkontrollierte Verbrennung und beeinflussen die Zündwinkelregelung.
- Drucksensoren: Raildruck, Ladedruck und Atmosphärendruck sind zentrale Größen für Einspritzung und Ladedruckregelung.
Die Aktorik-Seite
Aus diesen Eingangsdaten berechnet das Steuergerät die Ansteuerung von Einspritzventilen, Turbolader, Hochdruckpumpe, Drosselklappe, AGR-Ventil, Zündung, SCR-System und weiteren Komponenten.
Bei modernen Bosch MD1- und MG1-Plattformen arbeiten mehrere hundert Regelkreise gleichzeitig. Genau deshalb reicht es nicht, einzelne Kennfelder isoliert zu verändern.
Wichtige ECU-Plattformen
- Bosch EDC17: Weit verbreitete Diesel-Plattform bei VAG, BMW, Mercedes, Opel, Ford und weiteren Herstellern.
- Bosch MD1: Moderne Diesel-Generation, unter anderem bei 2.0 TDI EVO, 3.0 TDI und 4.0 TDI.
- Bosch MG1: Aktuelle Benziner-Plattform bei vielen Performance-Fahrzeugen von Audi, BMW, VW und Porsche.
- Continental Simos: Häufig bei VAG-Benzinern und einigen Dieselplattformen.
- Continental SID: Unter anderem bei Mercedes-Benz Dieselplattformen.
- Delphi DCM: Verbreitet bei Renault, Nissan, Dacia und weiteren Herstellern.
Jede ECU-Familie hat ihre eigene Speicherstruktur, eigene Sicherheitsmechanismen und eigene Kalibrierungslogik. Plattform-Kenntnis ist deshalb die Basis jeder seriösen Softwareoptimierung.
Kennfelder, Kennlinien und Modelle
Klassische Kennfelder sind nach wie vor ein wichtiger Bestandteil moderner Motorsteuerungen. Sie sind jedoch nur ein Teil des Gesamtsystems. Moderne Steuergeräte arbeiten zusätzlich mit Kennlinien, Kennwerttabellen, Zustandsmodellen und physikalischen Modellen.
- Kennlinien: Eindimensionale Zuordnungen, zum Beispiel Temperatur zu Korrekturfaktor.
- Kennfelder: Zweidimensionale Tabellen, etwa Drehzahl und Last zu Sollwert.
- Kennwerttabellen: Festwerte, Schwellen und Parameter für Diagnose, Plausibilisierung und Adaption.
- Zustandsmodelle: Berechnung thermischer Zustände von Katalysator, DPF, Turbolader oder Motorbauteilen.
- Drehmomentmodelle: Berechnung von Sollmoment, Istmoment, Reibmoment und Verlustmomenten.
- Physikalische Modelle: Modelle für Luftpfad, Brennraum, Abgasstrom und Bauteilschutz.
Die Schwierigkeit liegt nicht darin, ein einzelnes Kennfeld zu verändern. Die Herausforderung liegt darin, alle abhängigen Systeme konsistent zueinander zu kalibrieren.
Was wird bei einer professionellen Softwareoptimierung verändert?
Eine seriöse Kalibrierung verändert nicht einzelne Zufallswerte. Sie passt mehrere zusammenhängende Bereiche gleichzeitig an. Dazu gehören Drehmomentmodell, Ladedruckregelung, Einspritzstrategie, Raildruck, Luftmassenmodell, Schutzfunktionen und Getriebeintegration.
Drehmomentmodell
Moderne Steuergeräte arbeiten drehmomentbasiert. Der Fahrerwunsch wird in ein Soll-Drehmoment übersetzt. Das Steuergerät koordiniert anschließend Einspritzung, Ladedruck, Zündwinkel und weitere Aktoren, um dieses Drehmoment sauber zu erreichen.
Bei einer Optimierung werden die relevanten Drehmomentanforderungen und Begrenzungen angepasst. Gleichzeitig müssen Plausibilitätsprüfungen zwischen Motorsteuergerät und Getriebesteuergerät berücksichtigt werden.
Ladedruckregelung
Die Ladedruck-Sollwerte werden dort angepasst, wo Turbolader und Motor noch Reserven haben. Entscheidend ist eine drehzahl-, last- und temperaturabhängige Kalibrierung. Eine pauschale Anhebung führt häufig zu Überschwingern, Notlauf oder unnötiger thermischer Belastung.
Mehr dazu im Artikel Ladedruckregelung erklärt.
Einspritzstrategie
Bei Dieselmotoren werden Einspritzmenge, Einspritzzeitpunkt, Vor- und Nacheinspritzungen sowie Raildruckanforderungen abgestimmt. Bei Benzinmotoren spielen Direkteinspritzung, Lambda-Strategie, Zündwinkel und Bauteilschutz eine zentrale Rolle.
Raildruck
Der Common-Rail-Hochdruck kann im Rahmen einer Optimierung angepasst werden, darf aber niemals pauschal erhöht werden. Entscheidend sind Hochdruckpumpe, Injektoren, Leitungen, Rail, Temperaturverhalten und die Grenzen der Druckregelung.
Schutzfunktionen
Schutzfunktionen bleiben bei einer seriösen Kalibrierung aktiv. Dazu gehören Notlaufstrategien, Abgastemperaturbegrenzungen, Ladedruckgrenzen, Drehmomentbegrenzungen und Plausibilitätsprüfungen.
Eine Optimierung, die Schutzfunktionen deaktiviert, ist nicht aggressiver – sie ist schlechter.
Getriebeintegration
Motorsteuergerät und Getriebesteuergerät kommunizieren permanent miteinander. Wenn das Motorsteuergerät mehr Drehmoment anfordert, als das Getriebe freigibt, greift das Getriebe über den CAN-Bus ein und reduziert das Motormoment.
Mehr dazu im Artikel DSG Optimierung erklärt.
Stage 1, Stage 2 und Stage 3 erklärt
Stage 1
Stage 1 erfolgt auf unveränderter Serienhardware. Es wird ausschließlich die Software angepasst. Ziel ist eine saubere Leistungssteigerung innerhalb der vorhandenen Reserven von Motor, Turbolader, Kraftstoffsystem und Getriebe.
- Keine Hardwareänderung notwendig
- Gute Alltagstauglichkeit
- Rückrüstung auf Originalsoftware möglich
- Leistungssteigerung durch Serienhardware begrenzt
Stage 2
Stage 2 setzt zusätzliche Hardware voraus, zum Beispiel einen größeren Ladeluftkühler, eine geänderte Abgasanlage, eine optimierte Ansaugung oder einen Hybrid-Turbolader.
- Größeres Performance-Fenster
- Bessere thermische Reserven bei passender Hardware
- Höhere Belastung für Motor und Antrieb
- Software muss exakt auf die Hardware abgestimmt werden
Stage 3
Stage 3 beschreibt umfangreiche Motor- und Antriebsumbauten. Dazu gehören verstärkte Kupplungen, größere Turbolader, andere Einspritzdüsen, stärkere Hochdruckpumpen, geänderte Motorkomponenten oder vollständig aufgebaute Motoren.
- Sehr hohe Leistungssteigerungen möglich
- Deutlich höherer technischer Aufwand
- Höhere Kosten für Hardware und Abstimmung
- Alltagstauglichkeit und Straßenzulassung müssen individuell bewertet werden
Warum haben Fahrzeuge ab Werk Leistungsreserven?
Viele Fahrzeuge besitzen ab Werk technische Reserven. Das bedeutet jedoch nicht, dass Hersteller Leistung verschenken. Serienkalibrierungen müssen weltweit funktionieren und zahlreiche Anforderungen gleichzeitig erfüllen.
- Weltweite Märkte: Fahrzeuge müssen mit unterschiedlichen Kraftstoffqualitäten und Klimabedingungen funktionieren.
- Emissionen: Gesetzliche Vorgaben beeinflussen Verbrennung, Abgasnachbehandlung und Verbrauch.
- Modellabstufungen: Gleiche Motorhardware wird häufig softwareseitig in verschiedene Leistungsstufen aufgeteilt.
- Haltbarkeit: Hersteller müssen hohe Laufleistungen auch unter schlechten Bedingungen absichern.
- Wartungsreserven: Serienfahrzeuge müssen auch mit älteren Filtern, schwankender Ölqualität und ungünstiger Nutzung funktionieren.
- Markenstrategie: Leistungsunterschiede dienen oft der Produktabgrenzung innerhalb einer Modellpalette.
Massenfile oder OEM-orientierte Kalibrierung?
In der Branche gibt es große Qualitätsunterschiede. Ein generisches Massenfile verfolgt meist nur ein Ziel: möglichst viel Leistung mit möglichst wenig Aufwand. Eine OEM-orientierte Kalibrierung betrachtet dagegen das Gesamtsystem.
- Datenquelle: Massenfiles sind oft generisch, professionelle Kalibrierungen sind fahrzeugspezifisch.
- Drehmomentverlauf: Gute Kalibrierungen erzeugen ein stabiles Drehmomentplateau statt nur einen hohen Peak-Wert.
- Schutzfunktionen: Seriöse Software erhält Schutzkennfelder und passt sie sinnvoll an.
- Fahrbarkeit: OEM-orientierte Kalibrierungen bleiben harmonisch und alltagstauglich.
- Diagnose: Saubere Software verursacht keine unnötigen Fehlerspeichereinträge.
- Rückrüstung: Die Originalsoftware wird vollständig gesichert und dokumentiert.
Kann Chiptuning erkannt werden?
Ja. Moderne Steuergeräte verfügen über verschiedene Möglichkeiten, Softwareänderungen nachvollziehbar zu machen. Dazu gehören Flash Counter, Prüfsummen, Calibration Verification Numbers, Diagnoseeinträge und Abweichungen im Softwarestand.
Eine vollständig unsichtbare Optimierung gibt es bei modernen Plattformen praktisch nicht mehr. Realistisch ist eine technisch saubere Kalibrierung, die im Alltag und in der normalen Diagnose unauffällig funktioniert, aber bei einer tiefen OEM-Prüfung erkennbar sein kann.
Welche Risiken entstehen durch schlechtes Chiptuning?
Die meisten Probleme entstehen nicht durch Softwareoptimierung an sich, sondern durch schlechte Kalibrierung. Typische Folgen sind fehlerhafte Drehmomentmodelle, überhöhte Abgastemperaturen, Ladedrucküberschwinger, Notlauf, Adaptionsprobleme oder erhöhter Verschleiß an Getriebe und Antrieb.
Entscheidend ist deshalb nicht der höchste Prüfstandswert, sondern die Qualität der Kalibrierung.
Häufige Mythen über Chiptuning
Chiptuning zerstört jeden Motor
Diese Aussage ist zu pauschal. Eine saubere Softwareoptimierung innerhalb sinnvoller Grenzen ist beherrschbar. Schlechte Files mit entfernten Schutzfunktionen, falschen Drehmomentmodellen oder überzogenen Werten erhöhen das Risiko jedoch deutlich.
Mehr Ladedruck bedeutet automatisch mehr Leistung
Falsch. Mehr Ladedruck bringt nur dann Leistung, wenn Luftmasse, Kraftstoffmenge, Abgastemperatur, Verdichtereffizienz und Drehmomentmodell zusammenpassen. Sonst entsteht vor allem mehr Wärme.
Alle Tuner verwenden dieselbe Software
Viele Tuner nutzen ähnliche Tools zum Lesen und Schreiben. Entscheidend ist aber nicht das Werkzeug, sondern die Kalibrierung, die am Ende im Steuergerät landet.
Serienfahrzeuge laufen immer optimal
Serienfahrzeuge sind Kompromisse aus Emissionen, Haltbarkeit, weltweiten Märkten, Kosten und Modellpolitik. Für ein konkretes Fahrzeug mit bekanntem Zustand und definierter Nutzung gibt es häufig Optimierungspotenzial.
Häufige Fragen zum Chiptuning
Was ist Chiptuning?
Chiptuning ist die Anpassung der Software im Motorsteuergerät, um Leistung, Drehmoment, Ansprechverhalten oder Effizienz zu verändern.
Was passiert technisch bei einer Softwareoptimierung?
Mehrere zusammenhängende Bereiche werden neu kalibriert: Drehmomentmodell, Ladedruckregelung, Einspritzung, Raildruck, Lambda-Strategie und Schutzfunktionen.
Wie unterscheidet sich Stage 1 von Stage 2?
Stage 1 erfolgt auf Serienhardware. Stage 2 setzt zusätzliche Hardware voraus und benötigt eine darauf abgestimmte Software.
Ist Chiptuning sicher?
Bei sauberer Kalibrierung innerhalb sinnvoller Grenzen ist das Risiko beherrschbar, aber nie null. Schlechte Files erhöhen das Risiko deutlich.
Kann die Optimierung rückgängig gemacht werden?
Ja. Vor einer professionellen Optimierung wird die Originalsoftware gesichert und kann bei Bedarf wiederhergestellt werden.
Fazit
Modernes Chiptuning ist weit mehr als eine einfache Leistungssteigerung. Die Motorsteuerung arbeitet mit komplexen Modellen, Schutzfunktionen und Abhängigkeiten zwischen Motor, Getriebe und Abgasnachbehandlung.
Eine hochwertige Kalibrierung berücksichtigt Leistung, Haltbarkeit, Fahrbarkeit und Diagnosefähigkeit gleichermaßen. Genau darin liegt der Unterschied zwischen einem generischen Massenfile und einer professionellen, OEM-orientierten Softwareoptimierung.
Hirsch Racing steht für Vehicle Software Engineering: fahrzeugspezifisch, dokumentiert und mit technischem Verständnis für moderne ECU-Plattformen.